

Editor's Note
모빌리티 기술, 어렵게 느껴진다면 여기에 집중해주세요! 어려운 용어와 기술도 쉽고 재미있게 배울 수 있으니까요. HL 모빌리티 전문가들이 직접 누구나 쉽게 모빌리티 업계 동향과 기술 이야기를 이해할 수 있도록 떠 먹여 드리는 <한 입 모빌리티>, 시작합니다!
고성능 장비의 개발, AI기술의 획기적 발전과 함께 자율주행 자동차 연구 개발이 그 어느때보다 활발히 이뤄지고 있습니다. HL만도 역시 완전자율주행 실현을 위해 다양한 기술 개발을 진행하고 있는데요.
오늘은 HL만도의 ‘SbW(Steer by Wire)’를 중심으로 ‘CASE’라는 메가 트렌드 속에서 HL만도가 나아가고 있는 방향에 대해 살펴봅니다. 약 5분 분량입니다.
자율주행 자동차를 위한 조향 시스템의 변화
#완전자율주행 #SbW #조향시스템 #시스템아키텍처 #SFA
• 완전자율주행으로 가는 길
• 자율주행과 조향 시스템의 변화와 HL만도의SbW
• SbW를 위한 시스템 아키텍처개발하기
*목차 클릭 시 해당 문단으로 이동합니다.
콘텐츠 미리보기
☑️ 조향 시스템은 미래 모빌리티 C.A.S.E(Connected, Autonomous, Shared, and Electric) 트렌드에 대응하기 위해 높은 안전성과 탑승 공간 확보, 안락함 증대, 다양한 부가기능 등이 요구된다.
☑️ HL만도는 완전자율주행 시대를 대비해 '전기/전자 시스템 이중화(E/E Redundancy)' 기술을 활용한 샤시와 운전대 사이에 물리적 연결점이 없는 전기 신호식 지능 조향 시스템 'SbW'(Steer by Wire)를 개발했다.
☑️ 미래형 조향 시스템 'SbW'는 자율주행 중 고장이 발생해도 정상적으로 작동하며 안전을 유지할 수 있도록 다중화 시스템을 적용, 다양한 고장 상황을 연구해 안전성을 높이고 있다.
☑️ SbW는 다양한 종류의 아키텍처 개발 과정을 거쳐 어떤 단일 장애가 발생해도 통제력을 상실하지 않으며 100%의 피드백 토크를 생성한다.

완전자율주행으로 가는 길
약 100년, 짧게는 50년 전부터 연구·개발되어온 것으로 알려져 있는 자율주행 자동차 연구 개발. 최근에 이르러 카메라, 라이다(LiDar), 레이다 및 컴퓨터 성능, AI의 획기적인 발전과 함께 자율주행 자동차 기술의 실현 가능성이 높아져 연구개발이 본격적으로 이뤄졌고, 실제로 시장 출시와 서비스 확대 등의 실용화가 일부 진행됐는데요. 다양한 자율주행 기술이 개발되면서 향후 성장 가능성도 높게 점쳐집니다.

자율주행 기술은 크게 6단계로 구분됩니다. 이 구분은 미국자동차공학회(SAE International, 이하 SAE)에서 세분화해 정의했으며, 현재 국제적으로 통용되고 있습니다. 레벨이 높아질수록 운전에 있어서 인간의 개입은 최소화됩니다.
운전자가 완전히 자유로울 수 있는 레벨4 이상부터는 로보택시, 자율주행 배달서비스, 무인 셔틀버스, 자율주행 물류서비스 등이 가능하게 됩니다. 자율주행 레벨4 또는 레벨5의 전망은 여러가지 견해로 보고되고 있으나 Frost & Sullivan 자료에 따르면 전세계 자동차시장에서 2025년에는 약 4%, 그리고 2030년이 되면 약 15%를 점유할 것으로 예상됩니다.
자율주행 자동차의 효용성을 살펴볼까요? NHTSA(미국 도로교통안전국)의 조사 결과, 현재의 자동차 교통사고 원인의 90%는 운전자의 부주의이며, 사고를 막을 수 있다면 약 4천억 달러의 경제적 절감효과가 예상된다고 합니다. 또한 차량 활용도가 5~10%인 현재의 차량 개인 소유 형태에서 자율주행자동차의 차량 공유 모델로 이용 행태가 바뀌면 활용도는 75%까지 증가할 것으로 예상됩니다. 탑승객의 자유도 역시 높아집니다. 자율주행 자동차내에서는 모든 승객이 탑승자가 되어 이동 중 회의, 쇼핑, 오락, TV/영화 시청 등의 다양한 활동들을 즐길 수 있을 것입니다.

하지만 완전자율주행을 위해 아직 해결해야 할 여러 문제점이 있는데요. 자율주행 시스템이 지나치게 안전을 보수적으로 고려하여 십자로에서 좌회전을 하지 못하거나 갑작스러운 정차로 인한 후방추돌사고, 포장 중인 아스팔트에 진입하여 빠져나오지 못하거나 전방 트럭의 흰 배경을 하늘로 인식하여 추돌하는 등의 많은 사건과 사고들이 종종 발생하고, 기사화되고 있습니다. 때문에 자율주행차량과 서비스의 시장 출시시기와 기술 완성도에 대한 비관적 전망이 앞서 설명한 낙관적 전망과 갑론을박을 펼치고 있는 상황입니다.
이러한 상황에서도 분명한 것은 자율주행 레벨2, 더 나아가 레벨3까지의 기술은 개발이 완료돼 시장에서 빠르게 적용되고 있다는 점입니다. 레벨4 기능에 대해서도 자율주행 사용영역인 ODD(Operational Design Domain)내에서 시범운행 또는 안전운전자 동행 하에서 서비스가 출시되고 있어 기술의 발전과 함께 자율주행의 운행 경로가 주차와 저속주행에서 일반 도심과 교외지역에 이르기까지 지속적으로 확장될 것으로 보입니다.
자율주행과 조향 시스템의 변화와 HL만도의 SbW
앞서 설명한 자율주행 자동차 트렌드와 함께 모빌리티 시장은 ‘C.A.S.E(Connected, Autonomous, Shared, and Electric)’라는 메가 트렌드 속에 있습니다. 조향 시스템(Steering System)을 연구, 개발하는 엔지니어들은 이러한 트렌드 속에서 새롭게 발생하는 여러 고객의 요구사항과 다양한 운전환경에서의 사용 사례(Use Case)에 대해 고민하지 않을 수 없습니다. 이런 C.A.S.E 트렌드 변화에서 조향 시스템은 높은 안전성과 탑승자 공간 확보, 안락함 증대, 다양한 부가기능, 고출력 시스템 등이 요구됩니다.
이를 반영하여 SbW(Steer by Wire), RWS(Rear Wheel Steering), 4WIS(4 Wheel Independent Steer), New HMI(Human Machine Interface)와 같은 신제품 개발과 다중 안전화 시스템, 고전압 E/E System, 자율주행 제어로직, 통합제어기술 등과 같은 신기술 연구가 필요합니다.

HL만도는 2012년부터 EPS System 고장 시 발생할 수 있는 급격한 조향 보조력 손실로 인한 위험을 방지하기 위한 목적으로 개발한 전기/전자 시스템 이중화(E/E Redundancy) 기술을 활용, 조향 클러치가 없는 ‘전기 신호식 지능 조향 시스템’ 컨셉인 ‘Pure Play’ SbW 시스템 개발을 검토했습니다. 이후 2016년부터 본격적으로 ‘스티어 바이 와이어(Steer by Wire, 이하 SbW)’ 개발에 나서 제품 양산을 준비하고 있습니다. 매년 HL만도는 국내외 고객들을 대상으로 SbW와 IDB(일체형 통합 전자브레이크) 제품이 적용된 차량으로 Summer & Winter Ride Session 행사를 진행한 바 있습니다.
특히 SbW는 물리적 연결을 없애 기존의 자동차 설계와 자율주행의 제약을 뛰어넘을 수 있는 기술로 평가받고 있습니다. 가장 먼저 샤시와 운전대 사이에 조향 클러치와 같은 물리적 연결점이 없기 때문에 운전석 위치가 고정될 필요도 없어지고, 이에 따라 다양한 차량 바디 및 내부 공간 설계가 가능해집니다. 차량 실내 공간이 더 넓어지고 공간 활용도가 높아지는 것입니다.
또한 완전자율주행의 지원과 자율주행 모드에서 조향 휠을 고정하는 ‘Quiet Mode’를 통해 탑승자 피로를 방지하고, 가변 기어비 구현 및 주행 모드에 따른 개별 설정이 가능합니다.

이러한 기술력의 우수함을 바탕으로 HL만도의 SbW는 CES 2021 VIT부문 혁신상을 수상하기도 했습니다.
▶ HL만도의 SbW란? 신비한 모빌리티 용어 사전 바로가기
SbW를 위한 시스템 아키텍처 개발하기
SbW라는 신제품을 개발하기 위해서는 해당 제품이 적용될 수 있는 환경에서의 많은 사용자 사례와 고객의 요구사항, 시장과 기술 동향을 분석하고 국내외 표준과 법규들을 분석해 시스템 아키텍처에 반영하는 과정을 거쳐야 합니다. 또한 자율주행에서 운전자가 조향이나 제동 과정에 제외돼있을 수 있기 때문에 고장이 발생해도 정상적으로 작동하며 안전을 유지할 수 있도록(페일 오퍼레이셔널, Fail operational) 다양한 사례를 검토하고, 안전성을 높이는 과정이 반드시 필요합니다.
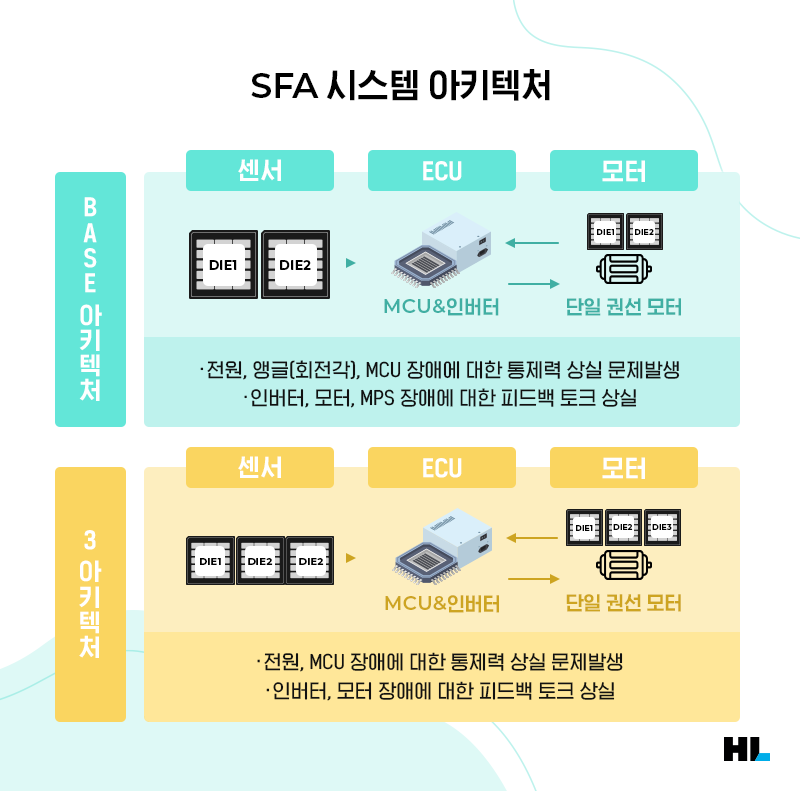
앞서 언급한 시스템 아키텍처와 관련해 SFA System(Steering Feedback Actuator System)에서 적용 가능한 아키텍처를 살펴볼까요? ‘Base 아키텍처’는 과거 EPS 시스템에 적용되었던 구조로, 모든 신호와 전원 서킷이 단독으로 구성돼 있어 SbW 시스템에서 전원과 조향각(Angle), MCU 장애에 대한 통제력을 상실하게 되면 운전자가 조향을 불가능하게 할 수 있습니다. 또한 인버터와 모터, MPS(Motor Position Sensor)의 장애에 대해 피드백 토크*가 발생하지 않는 상황을 만들어 조향 불안정성을 야기시킬 수 있습니다.
*피드백 토크(Feedback Torque): 운전자의 조향 작동에 대해 SFA 모터가 반력을 발생시켜 조향 작동 안정성을 제공하기 위한 토크
‘3 Architecture’의 경우 앞서 언급된 베이스 아키텍처와는 다르게 센서 신호 다중화(Sensor Signal Redundancy)를 구현, 센서 각도(Sensor Angle)와 MPS의 단일 장애에 대해서는 정상 구동이 가능하지만 여전히 전원과 MCU, 인버터 등의 장애에 대해서는 통제력 상실과 피드백 토크의 문제가 발생할 수 있습니다.

그렇다면 SFA 시스템의 단일 장애 발생 시 조향 제어와 피드백 토크를 유지/확보할 수 있는 구조는 어떤 것이 있을까요? ‘4A 아키텍처’라고 불리는 중복 백업 시스템은 모터를 제외한 모든 서킷(Circuit)이나 신호가 다중화돼 있어 어떤 단일 장애가 발생해도 통제력을 상실하지 않으며, 모터 외의 단일 장애에 대해 100%의 피드백 토크를 생성합니다.
또 다른 옵션인 ‘4B 아키텍처’는 중복 병렬 시스템으로, 모터 내 서킷(또는 와인딩)까지 이중화 설계가 되어 모든 단일 장애에 대해 통제력 상실 문제가 발생하지 않으며, 최소 50%의 피드백 토크를 생성합니다.
HL만도는 이처럼 다양한 아키텍처 개발 과정을 거쳐 SbW 개발에서 필수적으로 요구되는 ‘페일 오퍼레이셔널’이라는 과제에 다중화 시스템을 적용, 정상 작동이 이뤄지도록 구현했습니다. HL만도는 이제 확대된 다중 장애를 대비한 설계와 스티어-바이-브레이크 또는 후륜 조향 등의 통합제어를 통해 자율주행의 안전성을 높일 수 있도록 지속적인 연구와 개발을 진행하고 있습니다.
*위 콘텐츠는 Auto Journal 2022.08호에 실린 원고를 기반으로 제작되었습니다.




