

Author’s Note : 보이지 않는 길 위에서 AI로 안전의 좌표를 찍다
안녕하세요, HL클레무브 ADS Lab에서 자율주행 차량이 자신의 정확한 위치를 파악할 수 있도록 위치 추정(Localization) 기술을 연구하고 있는 이재운입니다. 자율주행 기술이 나날이 고도화되면서 ‘핸즈프리’ 주행은 이제 우리 곁의 현실이 되고 있지만, 연구원으로서 저의 고민은 바로 이 지점에서 더욱 깊어졌습니다. “자율주행 차량의 눈이 되는 카메라와 라이다 그리고 GPS가 주행 중 고장이 난다면, 정확한 위치를 제공하는 대체 센서가 필요하지 않을까?” 라는 근원적인 물음 때문이었는데요. 오늘 이 자리를 통해, 값비싼 장비 대신 최신 AI 아키텍처인 Transformer를 활용하여 측위센서가 없는 어둠 속에서도 한 치의 오차 없이 길을 찾아내는 ‘AI 위치 추정 시스템’의 개발 비화를 들려드리고자 합니다.
1. 양산의 냉혹한 현실: 저가형 센서의 한계를 넘어야 하는 이유
현재 자율주행 기술은 고가의 정밀 장비를 장착한 연구용 프로토타입 차량의 단계를 넘어, 실제 도로 위를 달리는 수십만 대의 일반 양산차(L2+)로 그 범위를 넓히고 있습니다. 하지만 실제 양산 현장에서는 비용이라는 냉혹한 현실과 마주하게 됩니다. 대당 수천만 원에 달하는 고정밀 관성 항법 장치 대신, 상대적으로 저렴한 IMU(Inertial Measurement Unit, 관성 측정 장치)를 사용해야만 하는데, 이러한 저가형 센서들은 데이터 노이즈가 심할 뿐만 아니라 시간이 흐를수록 적분 오차가 기하급수적으로 커져 차량의 위치가 실제와 멀어지는 치명적인 약점이 있습니다.
설상가상으로, 새로운 안전 규제인 DCAS(UN R171)는 핸즈프리 주행 중 GPS신호가 끊기거나 시스템에 오류가 발생해도 일정 시간(Continuation Time) 동안 차량이 스스로 위치를 정밀하게 파악하고 안전하게 제어될 것을 요구하고 있습니다. 결국 우리 연구진에게는 '보급형 센서로도 하이엔드급 성능'을 구현해내야 하는 매우 도전적인 숙제가 주어진 셈입니다.
*DCAS: Driver Control Assistance Systems, 운전자 제어 보조 시스템
저희는 이 난제를 해결하기 위해 다음과 같은 세 가지 질문을 던졌습니다.
- Transformer를 통해 차량 동역학의 비선형적 특성을 더 효과적으로 이해할 수 있는가?
- 기존 방식의 한계를 극복하면서도, 예측의 불확실성(Predictive Uncertainty)을 추정할 수 있는 간단한 방법이 있는가?
- 실제 End-to-End 프레임워크에 쉽게 통합될 수 있는 실시간 모델을 설계할 수 있는가?
2. 혁신의 핵심: 시계열 처리에 최적화된 Transformer 아키텍처
먼저 자연어 처리 분야에서 혁신을 일으킨 Transformer 구조를 시계열 차량 데이터 분석에 전격 도입했습니다. 기존에 주로 쓰이던 순환 신경망 LSTM(Long Short-Term Memory), GRU(Gated Recurrent Unit) 방식은 데이터를 순차적으로 처리하는 구조적 특성상 연산 속도가 느리고 장거리 주행 시 과거의 맥락을 놓치는 한계가 있었으나, Transformer는 이를 완전히 뛰어넘는 성능을 보여주었습니다.
- 다중 센서 특징 추출: 차량의 조향각, 각 바퀴의 휠 속도, 횡가속도 등 복잡한 상관관계를 가진 차량 동역학데이터를 병렬로 분석하여, 현재 주행 상황에서 가장 중요한 데이터가 무엇인지 판단하고 미래의 차량 움직임을 예측하는데 사용하도록 합니다.
- 압도적인 연산 효율의 실현: 실험 결과, Transformer 기반 모델은 기존 모델 대비 추론 속도를 무려 10배 이상 단축하는 경이로운 성과를 거두었습니다. 이는 찰나의 순간에 조향을 결정해야 하는 자율주행 임베디드 제어기 환경에서 실시간성을 보장하는 가장 핵심적인 지표가 됩니다.
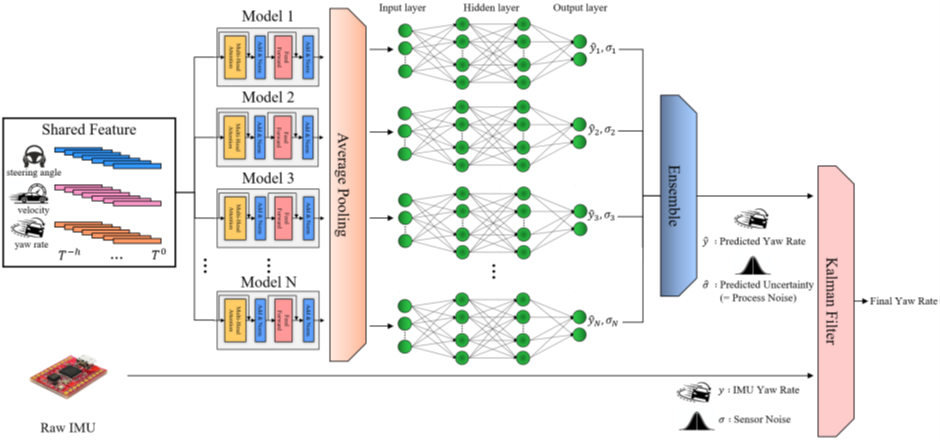
- 불확실성의 수치화: 단순히 위치를 예측하는 것에 그치지 않고, 예측 결과의 불확실성(Uncertainty)을 수치로 환산합니다. 만약 AI가 판단하기에 현재 상황이 너무 복잡하여 확신이 낮아진다면, 시스템은 즉시 기존 IMU센서 정보를 이용하는 적응형 전략을 취하여 안전 마진을 확보합니다.
3. 실증 실험과 데이터의 증명: 100km 고속도로 위에서의 정밀 분석
우리의 가설을 증명하기 위해 실제 L2+ 시험 차량을 활용하여 확보한 약 100km 구간의 고속도로 주행 데이터셋은 모델의 강건성을 검증하는 훌륭한 시험대가 되었습니다.


- 데이터셋 및 시나리오: 약 100km 구간의 고속도로 주행 데이터를 기반으로, 직선 주행은 물론 급격한 곡선로를 포함한 IC/JC와 반복적인 차선 변경(Lane Change) 등 동적 거동이 심한 상황을 모두 포함하여 모델의 강건성을 검증했습니다.
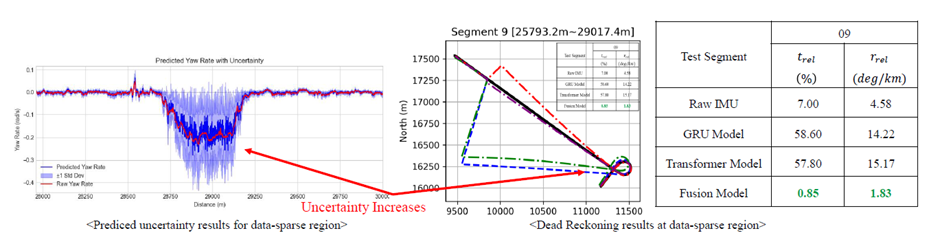
- 정량적 오차 분석: 기존의 물리 법칙 기반 모델 대비 우리가 개발한 AI 모델은 장거리 주행 환경에서 상대 이동 오차는 약 5배, 상대 회전 오차는 약 3배 개선된 결과를 보여주며 장거리 주행 환경에서도 일관된 위치 추정 성능을 유지해냈습니다.
- 적응형 센서 융합(Adaptive Fusion): 모델이 예측값과 함께 출력하는 불확실성(Uncertainty) 지표를 활용합니다. 상황이 복잡해져 AI의 확신이 낮아지면 시스템이 즉시 기존 IMU 센서 데이터의 비중을 높여 전체 시스템의 안전 마진을 확보하는 구조입니다.
마치며: 소프트웨어가 만드는 자율주행의 새로운 나침반
이번 연구는 점차 강화되는 국제 안전 규제(DCAS)에 대한 선제적인 기술 대응을 넘어, 하드웨어 사양의 물리적 한계를 AI 알고리즘으로 극복했다는 점에서 큰 의미가 있습니다. 우리는 기계적인 센서가 완벽하지 않은 순간에도 데이터 속에서 길을 찾아내는 Transformer라는 똑똑한 길잡이가 있다면, 자율주행차는 GPS 신호가 닿지 않는 깊은 터널 속에서도 결코 길을 잃지 않을 것이라는 확신을 얻었습니다.
우리가 그리는 안전의 좌표
자율주행의 미래는 단순히 ‘스스로 가는 차’를 만드는 것이 아니라, ‘어떤 악조건 속에서도 사람보다 더 정확하게 판단하는 시스템’을 구축하는 과정입니다. 비록 눈에 보이지 않는 신호가 끊기고 노이즈로 센서가 흔들릴지라도, 우리가 쌓아 올린 수만 번의 학습 데이터와 정교한 알고리즘은 차량이 나아가야 할 올바른 궤적을 묵묵히 그려낼 것입니다.
HL클레무브 ADS Lab은 앞으로도 연구실의 이론이 도로 위의 실제 안전으로 이어질 수 있도록 현장의 고민을 기술로 풀어내며, 전 세계 모빌리티 시장에서 가장 신뢰받는 ‘AI 나침반’을 완성해 나갈 것입니다. 우리가 찍는 안전의 좌표가 곧 미래 자율주행의 표준이 되는 그날까지, 우리의 혁신적인 시도는 멈추지 않을 것입니다.



