

Author’s Note
HL클레무브 Radar Innovation Lab에서 레이더 센서의 인식 능력을 연구하고 있는 강종구입니다.
자율주행의 가장 기초적이면서도 어려운 숙제는 바로 차량이 ‘내가 갈 수 있는 안전한 길(Free Space)'을 실시간으로 정확히 판별해내는 것입니다. 물론, 고가의 라이다(LiDAR)나 고해상도 카메라와 같은 훌륭한 대안이 있지만, 실제 양산되는 차량에 적용하기에는 비용 문제나 눈▪비 같은 기상 제약이 따르는 것이 현실입니다. 반면, 양산차의 필수 센서인 FMCW 레이더는 악천후에 강하고 경제적이지만, 수집되는 데이터가 희소(Sparse)하고 노이즈가 많다는 기술적 난관들이 있죠.
오늘 저는 이 레이더 센서만으로 제한된 임베디드 자원 내에서도 실시간으로 정적 환경을 확률적으로 맵핑하고 안전한 주행 경로를 찾아내는 '경량 점유 격자 지도(Occupancy Grid Map, OGM)' 시스템의 핵심 원리를 소개해 드리고자 합니다.
1. 레이더 점유 격자 지도(OGM)의 정의와 필요성
점유 격자 지도(Occupancy Grid Map, OGM)란 차량 주변 환경을 격자(Grid) 단위로 나누고, 각 셀에 장애물이 존재할 확률을 실시간으로 계산하여 시각화하는 기술입니다.
- 양산성 확보 : 고가의 라이다(LiDAR)를 대체하여 경제적인 FMCW 레이더만으로 구현이 가능합니다.
- 환경 적응성 : 카메라가 취약한 눈, 비 등 악천후 상황에서도 레이더의 높은 투과 성능을 바탕으로 안정적인 인지가 가능합니다.
- 리소스 최적화 : 제한된 차량용 임베디드 자원 내에서 실시간 맵핑이 가능하도록 설계되었습니다.
2. System Overview: 데이터 수집부터 지도 생성까지의 7단계 여정
저희가 제안하는 시스템은 메모리와 연산 효율을 극대화하기 위해 다음과 같이 톱니바퀴처럼 맞물려 돌아가는 7단계의 최적화된 파이프라인을 구축했습니다.

1. Radar Input Filtering: 수많은 데이터 중 움직이는 물체의 간섭이나 신뢰도가 낮은 가짜 신호를 먼저 걸러내 데이터의 ‘청정도’를 높입니다.
2. Decompression: 저장 용량을 아끼기 위해 이전 단계에서 압축해 두었던 지도 데이터를 다시 계산하기 편한 상태로 복원합니다.
3. Motion Compensation: 차가 이동하는 동안 지도도 함께 움직여야 하므로, 차량의 속도(ν)와 요레이트(γ) 정보를 기반으로 지도의 위치를 현 시점에 맞게 보정합니다.
4. Measurement Update: 레이더 신호가 들어온 구역에 실제로 장애물이 있을 확률을 통계적으로 계산해 지도를 채웁니다.
5. Filtering: 화면의 지저분한 점들을 지우듯, 확률적으로 튀는 노이즈를 매끄럽게 다듬어 오인식을 방지합니다.
6. Free Space Detection: 차를 중심으로 사방으로 가상의 선을 그어, 장애물에 가로막히지 않은 진짜 갈 수 있는 영역을 추출합니다.
7. Compression: 모든 계산이 끝난 지도는 다시 효율적으로 압축하여 메모리에 안전하게 저장합니다.
3. Motion Compensation: 차량의 움직임을 수식으로 잡다
자율주행차는 주행 중 계속해서 위치와 방향이 변합니다. 따라서 이전 프레임(frame) 지도를 현재 프레임(frame) 위치에 그대로 두면 지도가 뒤쳐지게 됩니다.
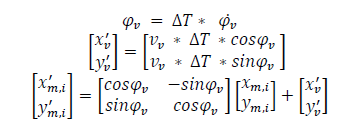
- 핵심 원리 :차량의 속도(𝑣ₜ)와 차체가 좌우로 회전하는 정도인 요레이트(𝛾ₜ)정보를 정밀하게 수치화합니다. 이를 지도 데이터에 투영하면, 차가 급격한 코너를 돌거나 터널 안에서 차선을 바꿔도 지도가 어긋나지 않고 차의 움직임에 맞춰 실시간으로 따라오게 됩니다.
▶ 강체 변환(Rigid Body Transformation) 행렬 적용
4. Measurement Update: 불확실한 점(Point)을 확실한 확률(Probability)로
레이더는 장애물의 어느 한 ‘점(Point)’만을 알려주지만, 실제 세상의 물체는 면적과 부피를 가집니다. 이를 수학적으로 해결하기 위해 두 가지 핵심 기법을 도입했습니다.
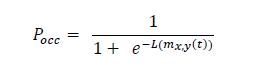
① Binary Bayes Filter & Log-odds : 복잡한 확률 계산을 산수로 바꾸다
매 순간 들어오는 데이터를 누적하여 신뢰도를 높여야 합니다. 하지만, 확률을 계속 곱하는 연산은 컴퓨터에 큰 부하를 줍니다.
- 해결책: 확률을 로그(Log) 형태로 변환하여 계산하는 방식을 택했습니다. 이렇게 하면 복잡한 곱셈이 단순한 덧셈과 뺄셈( 𝐿ₜ = 𝐿ₜ₋₁ + 𝐿ₛₑₙₛₒᵣ − 𝐿₀)으로 바뀌어, 처리 속도가 비약적으로 빨라지면서도 데이터의 정확성은 유지할 수 있습니다. 이렇게 계산된 로그 값을 다시 0~1 사이의 확률값으로 복원합니다.

② Inverse Sensor Model : 희소한 데이터를 풍성하게 채우다
레이더 점 하나가 찍히면, 그 지점을 중심으로 주변 구역까지 물체가 존재할 가능성을 퍼뜨립니다.
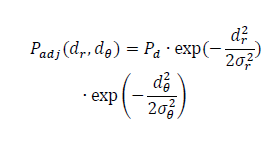
- 거리(𝜎ᵣ)와 각도(𝜎𝜃)오차를 반영한 2차원 가우시안 분포: 점 하나를 기준으로 주변 격자 셀들에 확률을 ‘부드럽게 확산(Diffusion)시키는 모델'을 적용합니다. 이를 통해 레이더 데이터 특유의 듬성듬성한 빈틈을 메우고, 장애물을 면(Area) 형태의 덩어리로 인식하여 훨씬 안정적인 지도를 완성합니다.
5. Block-based Compression: 메모리 사용량 53% 절감의 비밀
기술 상용화의 가장 큰 관건은 비용입니다. 비싼 메모리를 많이 쓰지 않고도 고해상도 지도를 그려내기 위해 저희는 블록 기반 양자화(Block-based Quantization) 기법을 독자 개발했습니다.
- 블록 분할: 지도를 통째로 저장하지 않고 8x8 셀 크기의 작은 블록으로 나눕니다.

- 4-bit 양자화: 각 블록 내 확률값들을 0부터 15사이의 숫자(4비트)로 단순화하여 저장합니다.

- 성능 검증: 이 알고리즘을 통해 기존 Float(32bit) 대비 메모리 사용량을 약 53% 절감했습니다. 그러면서도 수학적으로 증명된 최대 오차율은 단 3.3%에 불과하여, 실제 주행 인지 성능에는 영향을 주지 않으면서 시스템 효율성을 극대화하는 데 성공했습니다.
6. Filtering & Free Space: 노이즈를 넘어서

- 평활화: 3x3 가중 평균 필터(Weighted Mean Filter)를 적용하여 확률적으로 튀는 노이즈를 제거하고 지도를 부드럽게 다듬습니다.

- 주행 가능 영역 추출: 최종 생성된 지도에서 방위각(Azimuth) 단위로 레이 캐스팅(Ray Casting)을 수행하여, 차량 중심에서 장애물까지의 거리를 계산하고 Free Space 경계를 추출합니다.
7. Experimental Results: 복잡한 도심부터 급커브 터널까지
이 모든 이론적 성과는 실제 4개의 코너 레이더가 장착된 차량 테스트를 통해 증명되었습니다.

- 직선 및 곡선 도로: 강체 변환 덕분에 급커브 구간이나 터널 입구처럼 환경이 급변하는 곳에서도 지도의 연속성을 놓치지 않고 도로 경계(Road Boundary)를 명확히 따라갔습니다.
- 복잡한 도심: 가우시안 모델의 확산 효과로 공사 현장의 드럼통이나 불규칙한 가드레일 등도 끊김없이 안전하게 인식했습니다.
- 메모리 효율: 제안된 최적화된 압축 기술 덕분에 정해진 메모리 안에서 더 넓고 해상도 높은 지도를 실시간으로 운영할 수 있었습니다.
마치며: 정적 환경을 넘어, 살아 움직이는 세상을 읽는 나침반으로
이번 연구는 거대한 학습 데이터 없이도 오직 정교한 공학적 설계와 레이더 센서만으로 신뢰성 있는 지도를 그릴 수 있음을 증명했습니다. 저를 포함한 HL클레무브의 Radar Innovation Lab 연구원들은 여기서 멈추지 않고, 이제 멈춰 있는 장애물을 넘어 주변 차량이나 보행자의 미래 경로까지 예측하는 ‘동적 점유 격자 지도 (Dynamic OGM)’ 기술로 연구의 지평을 넓혀가고 있습니다.
비록 눈에 보이지 않는 전파를 다루는 일이지만, 그 안에 담긴 숫자들이 모여 가장 안전한 지도가 되고, 결국 모든 운전자가 안심할 수 있는 자율주행의 토대가 되기를 소망합니다.



