

안녕하세요, HL만도에서 스티어링 시스템의 미래를 연구하고 있는 김태식 책임연구원입니다.
현재 자동차 산업은 전동화와 자율주행이라는 거대한 두 축을 중심으로 유례없는 변화를 겪고 있습니다. 과거의 스티어링이 단순히 운전자의 손동작을 바퀴로 전달하는 기계적 연결 장치였다면, 미래의 스티어링은 차량 아키텍처와 유기적으로 결합하여 탑승자에게 새로운 가치를 제공하는 핵심 플랫폼으로 진화하고 있습니다. 오늘은 이러한 시장의 변화와 함께 HL만도가 준비하고 있는 기술적 지향점에 대해 심도 있게 공유하고자 합니다.
1. 자동차 기술 및 시장의 급격한 변화: 전동화와 자율주행의 현주소
Summary : 글로벌 모빌리티 시장 트렌드 데이터
- 글로벌 전기차(BEV+PHEV) 생산 비중 전망 : 2023년 16% → 2030년 49% (수직 상승)
- 기술 생태계 전환 : 유압식 조향(HPS) → 전동식 조향(EPS) → 바이와이어(SbW) 가속화
- 자율주행 기술 단계 (Gartner Hype Cycle 2017~2023) : 현재 ‘환멸 단계(Trough of Disillusionment)' 통과 중
- 레벨 4 자율주행 본격 시장 확대 시점: 2030년 이후로 전망
전기차 중량 증가에 따른 ‘48V 사양 시스템’의 필연성
글로벌 자동차 생산량에서 전기차(BEV+PHEV)가 차지하는 비중은 2023년 16%에서 2030년 49%까지 수직 상승할 것으로 전망됩니다. 이러한 급격한 전동화 흐름에 따라 조향 시스템 또한 유압식(HPS)에서 전동식(EPS) 및 SbW(Steer-by-Wire)로의 전환이 가속화되고 있습니다.
특히 전기차는 무거운 배터리 탑재로 인해 차량 중량이 크게 증가합니다. 따라서 이를 안정적으로 제어하기 위한 고출력화 기술과 차량의 전력 효율화를 극대화할 수 있는 48V 사양 시스템 개발이 미래 모빌리티의 필수적인 과제로 대두되었습니다.
가트너 하이프 사이클로 본 자율주행의 공백, ‘레벨 2+’와 ‘SbW’의 선제적 대응
자율주행 분야 역시 중요한 국면을 맞이하고 있습니다. 업계의 기대와 달리 높은 시스템 비용, 법규 제정 지연, 기술적 성숙도 등의 문제로 레벨 4 자율주행의 도입은 다소 지연되고 있으나, 그 공백을 레벨 2보다 안전성과 편의성이 강화된 레벨 2+ 시장이 빠르게 메우고 있습니다.
가트너(Gartner)의 하이프 사이클(2017~2023) 분석에 따르면, 자율주행 기술은 현재 ‘부풀려진 기대’를 지나 ‘환멸 단계(Trough of Disillusionment)’를 통과하고 있으며, 기술이 안정기에 접어들기까지는 약 10년 이상의 시간이 더 필요할 것으로 보입니다.
결국 레벨 4 자율주행 시장은 E/E 아키텍처 및 AI 기술의 발전, 그리고 시스템 가격의 합리화가 맞물리는 2030년 이후에야 본격적으로 확대될 것으로 예상됩니다. 이에 따라 HL만도는 SbW 시스템을 레벨 1~2 단계부터 선제적으로 적용을 시작하여, 레벨 3와 레벨 4 시장의 성숙도에 발맞춰 그 적용 범위를 점진적으로 넓혀가는 전략을 취하고 있습니다.
2. E/E 아키텍처 진화와 통합 섀시 제어
차량 전기·전자(E/E) 아키텍처란?
차량 내부의 수많은 센서, 제어기(ECU), 액추에이터들을 연결하는 ‘신경망과 컴퓨터 구조'를 뜻합니다. 과거에는 부품마다 독립된 컴퓨터가 붙어 선이 복잡한 '분산형'이었으나, 현재는 스마트폰처럼 하나의 중앙 컴퓨터가 영역별 허브를 통해 차량 전체를 다루는 '조널(Zonal) 아키텍처'로 진화하고 있습니다.
차량의 전기·전자 아키텍처(E/E Architecture)는 기존 분산형 구조에서 도메인(Domain)을 거쳐 영역별로 제어기를 통합하는 조널(Zonal) 구조로 진화하고 있습니다. 이러한 아키텍처적 혁신은 제어기(ECU) 개수를 획기적으로 줄이고 복잡한 와이어 하네스의 물리적 중량을 감축시켜 차량 설계의 효율성을 극대화합니다. 또한, 고성능 컴퓨팅을 기반으로 무선 소프트웨어 업데이트(OTA) 환경을 무결하게 구축하는 데 유리하며, 궁극적으로는 상위 레이어에서 데이터를 동기화하는 '통합 섀시 제어(Integrated Chassis Control)'를 가능하게 합니다. 통합 섀시 제어는 개별 섀시 시스템들을 유기적으로 결합하여 차량의 동적 성능을 한계 영역까지 극대화하는 것을 목적으로 합니다.
예를 들어, 스티어링 시스템에 장애가 발생하더라도 브레이크 제어를 통해 조향을 보좌하는SbB(Steer-by-Brake) 기술이나, 좌우 노면의 마찰 계수가 다른 스플릿 뮤(Split-mu) 상황에서 브레이크와 조향을 통합 제어하여 차량의 안정성을 유지하는 등 더욱 고도화된 백업 시스템 구현이 가능해지는 식입니다.
Less-Redundant SbW : 하드웨어 다이어트와 원가 경쟁력 확보
이처럼 시스템 간의 상호 의존성이 강화됨에 따라, 개별 시스템 단위의 과도한 이중화(Redundancy) 설계를 지양하고 차량 레벨에서의 안전 컨셉을 재설계함으로써 원가 경쟁력을 동시에 확보하는 전략이 중요해지고 있습니다. HL만도는 잉여 요소를 최적화한 ‘Less-Redundant SbW’ 컨셉을 통해 안전성과 원가 경쟁력이라는 두 마리 토끼를 동시에 잡는 패러다임을 선도하고 있습니다.

3. 가격을 넘어선 가치 중심의 진화 : 탑승자가 얻는 실질적 혜택
스티어링 시스템의 역사는 매뉴얼 방식에서 유압식, 전동식을 거쳐 바이와이어(By-Wire)와 미래형 인터페이스로 이어져 왔습니다. 지금까지의 조향 장치가 제조 원가나 판매 가격의 논리에 따라 발전해 왔다면, 앞으로의 기술은 '탑승자에게 어떤 가치와 혜택(Benefit)을 줄 것인가'에 집중해야 합니다.
SbW 시스템이 탑승자에게 제공하는 실질적인 가치는 매우 구체적입니다.
- 가변 기어비 기능 : 주행 속도나 상황에 따라 조향비를 자유롭게 변경하여 고속에서는 안정감을, 저속이나 주차 시에는 쾌적한 주차 경험을 제공합니다.
- 콰이어트 모드(Quiet Mode) : 핸들과 바퀴의 기계적 물리적 연결을 끊음으로써 노면으로부터 올라오는 거친 진동과 충격을 원천 차단하여 안락함을 극대화합니다.
- Foldable/Stowable 기능 : 자율주행 시 스티어링 휠을 대시보드 내부로 완전히 수납하여 차량의 실내 공간 활용성을 극대화할 수 있습니다.

4. HL만도가 그리는 미래 스티어링 전략 : 단기 & 장기 로드맵
HL만도는 변화하는 모빌리티 시장을 선도하기 위해 단기(Short Term)와 장기(Long Term)로 구분된 명확한 기술 로드맵을 가동하고 있습니다.
① 단기 전략: 탑승자 혜택 증대와 원가 경쟁력 확보
사용자의 안전을 위해 긴급 회피 조향(ESF)과 차량 상태 관리(Vehicle Health Management) 기능을 고도화하고, 가변 기어비 및 콰이어트 모드 등을 통해 편의성을 높이는 데 주력합니다. 동시에 차량 레벨의 안전 개념을 재검토하여 잉여 요소를 최적화한 'Less-Redundant SbW' 컨셉을 도입함으로써, 안전과 원가라는 두 마리 토끼를 잡는 전략을 추진하고 있습니다.
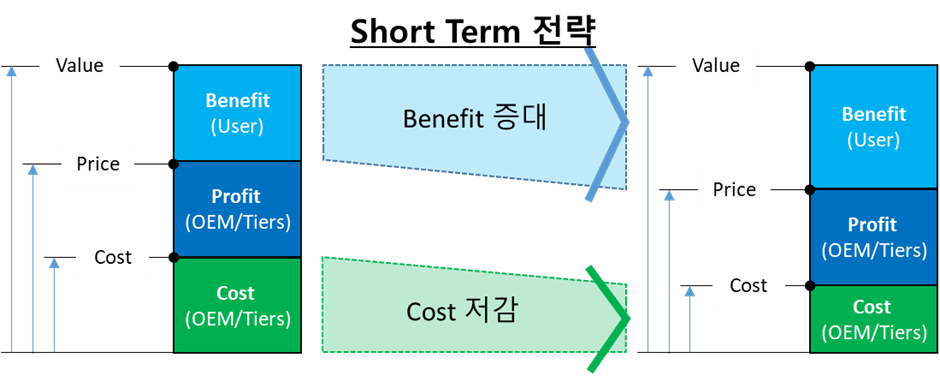
a. Benefit 증대
- 안전성 : 긴급회피조향(ESF), Vehicle Health Management, Safety 향상
- 편의성 : 가변기어비(주차편의성), Quite Mode(피로방지), Cabin 공간 증대, 자율주행 지원
b. Cost 저감
- Vehicle Level Safety Concept 검토, Less-Redundant SbW Concept 검토, F/Safety vs. 원가 최적화
② 장기 전략: AI 도입과 지능형 인터페이스 확장
장기적으로는 인공지능(AI)과 머신러닝(ML) 기술을 시스템 전반에 도입하여 조향 시스템을 더욱 자동화하고 개인화할 계획입니다. 시스템이 사용자의 운전 의도를 지능적으로 인지하여 새로운 부가가치를 창출하는 것이 최종 목표입니다. 이를 위해 HL만도는 아래와 같은 혁신적인 차세대 조향 인터페이스 연구를 지속하고 있습니다.
- 독립 조향 (Independent Steering) : 네 바퀴의 조향각을 각각 독립적으로 제어하는 기술
- 조이스틱 제어 및 제스처 인식 : 둥근 ‘스티어링 휠’의 한계를 깨는 인터페이스 혁신, 손가락의 미세한 움직임이나 지정된 제스처 신호만으로 차량 정밀 제어
- 인휠 코너 모듈 (Corner Module) : 구동(모터), 제동(브레이크), 조향(스티어링), 현가(서스펜션) 시스템을 하나의 독립된 모듈로 통합하여 바퀴 내부에 탑재하는 섀시 기술의 최종 진화 형태

a. Benefit 증대
- Keywords : AI / ML 적용, Automated, Personalized, Cognitive, Add Value
→ User에게 Benefit을 제공할 수 있는, Autonomous Driving에 적합한 Steering System 고민 필요
스티어링 시스템은 이제 단순한 부품을 넘어 자율주행 시대의 안전과 사용자 경험을 결정짓는 핵심 플랫폼입니다. HL만도는 시스템의 본질인 안전을 굳건히 지키면서도, 기술의 진보가 사용자에게 진정한 혜택으로 돌아갈 수 있도록 혁신을 거듭해 나가겠습니다.



