

Author's Note
안녕하세요, HL만도 글로벌 R&D 센터에서 지능형 제어 및 고장 예지 기술을 연구하고 있는 원종익 연구원입니다.
현대 자동차의 필수 요소로 자리 잡은 전동식 조향 장치(EPS, Electric Power Steering)는 운전자의 조향을 보조하는 핵심 시스템입니다. 만약 주행 중 EPS 시스템이 기능을 상실하는 '조향 보조 상실(LoA, Loss of Assist)'이 발생한다면, 차량의 조종성이 급격히 떨어져 치명적인 사고로 직결될 수 있습니다.
현재 업계에 적용된 기능 안전(Functional Safety) 메커니즘은 대부분 고장이 발생한 ‘이후’에 대처하는 사후 조치에 머물러 있습니다. 이번 엔지니어 노트에서는 소프트웨어 중심 자동차(SDV) 시대를 맞이하여, 고장이 생기기 전에 시스템의 성능 저하를 미리 감지하고 사고를 예방하는 '딥러닝 기반 차량 내장형 고장 예지(Prognostics) 기술'의 연구 성과와 실증 과정을 공유하고자 합니다.
📌 고장 진단(Diagnosis) vs 고장 예지(Prognostics)
• 고장 진단(Diagnosis): 시스템에 결함이 발생한 직후, 단순히 고장 여부만 파악하는 것을 넘어 '어디가' '어떻게' 고장이 났는지 그 구체적인 위치와 원인을 정확하게 찾아내는 사후 방어 기술입니다.
• 고장 예지(Prognostics): 시스템이 완전히 고장 나기 전, 부품이 닳아가는 미세한 성능 저하(열화) 단계를 모니터링하여 시스템의 '현재 건강 상태'를 실시간으로 정확히 판단하고, 이를 기반으로 잔존 수명을 예측해 선제적으로 정비할 수 있도록 돕는 예방 기술입니다.
모빌리티 패러다임의 변화, 사후 대처에서 선제적 예지로
기존의 EPS 고장 진단은 물리적 모델링에 기반한 '고장 관측기(Fault Observer)'를 주로 활용해 왔습니다. 하지만 이 방식은 복잡한 물리 법칙을 수학적으로 풀어내야 하므로 연산량이 많습니다. 게다가 파라미터의 불확실성에 취약하며, 다양한 차종과 양산 환경에 유연하게 수평 전개하기 어렵다는 한계가 있었습니다.
최근에는 딥러닝(DL)을 활용한 데이터 기반 접근법이 주목받고 있습니다. 그러나 기존 연구들은 대부분 시뮬레이션이나 실험실 환경에서 인위적으로 고장을 주입하고 이를 '탐지'하는 개념 증명(PoC, Proof of Concept) 수준에 머물렀습니다.
저희 연구진은 여기서 한 걸음 더 나아가 시뮬레이션이 아닌, 실제 상용 차량(중형 세단)의 CAN 통신 버스에서 획득한 주행 데이터를 활용했습니다. 모터가 완전히 고장 나기 전의 ‘성능 저하(Degradation)’ 단계를 사전에 예측하는 예지 보전(Predictive Maintenance) 알고리즘을 개발하는 데 집중한 것입니다.
📌 CAN(Controller Area Network) 통신 버스
자동차 내부의 수많은 제어기(ECU)들이 컴퓨터 본체처럼 서로 데이터를 주고받는 ‘차량 전용 정보 고속도로’입니다. 복잡한 배선 없이 핸들 토크, 차량 속도, 바퀴 회전각 등의 핵심 주행 데이터를 실시간으로 모든 부품에 안전하게 전달하는 역할을 합니다.
정상 데이터만으로 이상을 감지하는 MVT-GAN 아키텍처
차량 결함 데이터를 실제 도로 주행 환경에서 강제로 수집하는 것은 매우 위험합니다. 운전자와 차량 모두에게 심각한 안전 위험을 초래하기 때문입니다. 이 딜레마를 해결하기 위해, 저희는 오직 차량의 '정상 주행 데이터'만을 학습하여 이상을 감지하는 다변량 트랜스포머 기반 적대적 생성 신경망(MVT-GAN) 모델을 독자적으로 설계했습니다.

이 모델의 제너레이터(Generator)는 차량의 조향각, 종방향 속도, 요레이트(Yaw rate) 등 9개의 입력 신호를 바탕으로 작동합니다. 이를 통해 ‘정상 상태일 때 운전자가 느껴야 할 이상적인 스티어링 휠 토크’를 정밀하게 추정해 냅니다.
MVT-GAN 기반 고장 예지 메커니즘 4단계
1. 데이터 수집: 실제 상용 세단의 CAN 통신 버스에서 9가지 주행 신호 추출
2. 정상 상태 학습: 오직 '정상 주행 데이터'만으로 이상적인 조향 토크 추정 모델 생성
3. 편차 분석: 실제 측정된 토크와 모델 예측값 간의 미세한 오차(Residual) 추적
4. 이상 판별: OCSVM 알고리즘을 통해 결함 전 단계인 '미세 열화 상태' 감지
만약 EPS 모터에 기계적 마모나 전기적 손상 등의 열화가 발생하면, 시스템은 목표 궤적을 유지하기 위해 운전자에게 더 많은 조향력을 요구하게 됩니다. 이때 모델이 예측한 정상 토크와 실제 측정된 토크 사이에 발생하는 미세한 오차를 One-Class SVM (OCSVM) 알고리즘이 분석하여 시스템의 성능 저하를 판별해 내는 원리입니다.
10%의 미세한 열화까지 감지하는 압도적 정밀도
실차 검증 결과, 제안된 MVT-GAN 모델은 기존의 순환 신경망(RNN, LSTM, GRU) 기반 모델이나 단순 특징 기반(Feature-based) 알고리즘을 압도하는 평균 F1 스코어 0.954를 기록하며 가장 우수한 성능을 입증했습니다.
가장 괄목할 만한 성과는 정상 상태 대비 불과 10% 수준의 성능 저하(약 5Nm의 토크 편차)까지 선제적으로 탐지해 냈다는 점입니다. 현재 양산 차량에 적용된 페일세이프(Fail-safe) 메커니즘은 모터 전류 편차가 30A(약 35Nm의 토크 편차) 이상 발생해야만 극단적인 하드웨어 고장으로 인식하고 제어를 차단합니다. 이와 비교하면, HL만도의 시스템은 셧다운 되기 훨씬 이전 단계에서 잠재적 결함을 경고할 수 있는 엄청난 정밀도를 가진 셈입니다.

블랙박스의 한계를 깨고 물리적 직관을 증명한 어텐션 맵
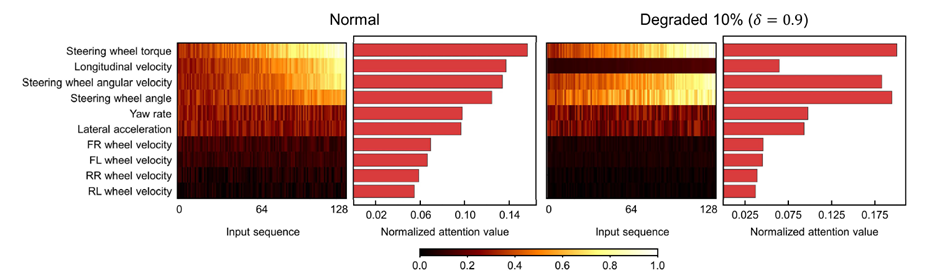
데이터 기반 딥러닝 모델은 종종 내부 연산 과정을 알 수 없는 '블랙박스'로 여겨집니다. 이 때문에 자동차 엔지니어링 환경에서 높은 신뢰성을 얻기 어려운 단점이 있었습니다. 저희는 이를 극복하기 위해 어텐션 메커니즘이 산출한 점수를 '어텐션 맵(Attention map)'으로 시각화하여 모델의 추론 과정을 역추적했습니다.
분석 결과는 놀라웠습니다. 신경망 모델은 정상 주행 상황을 판별할 때 '스티어링 휠 토크', '종방향 속도', '조향각' 데이터에 가장 높은 가중치를 부여하고 있었습니다. 이는 실제 EPS 시스템의 제어기(ECU)가 모터 보조 토크와 댐핑을 계산할 때 사용하는 핵심 파라미터와 완벽하게 일치합니다. 즉, 딥러닝 모델이 단순히 숫자 패턴을 외운 것이 아니라 차량의 물리적 동역학 규칙과 ECU 제어 로직을 스스로 이해하고 학습했음을 증명한 것입니다.
실차 적용을 위한 경량화 기술과 향후 연구 방향
개발된 알고리즘이 실제 양산 차량에 적용되기 위해서는 연산 자원이 극도로 제한된 엣지 디바이스(ECU) 위에서 실시간으로 동작해야 합니다. 이를 위해 학습 후 동적 양자화(Post-training dynamic quantization) 기법을 적용, 그 결과 32비트 부동소수점(FP32) 파라미터를 8비트 정수형(INT8)으로 압축하는 데 성공했습니다.
📌 학습 후 동적 양자화(Post-training dynamic quantization)
복잡하고 정밀한 32비트 부동소수점(FP32) 연산 구조를 지닌 딥러닝 모델을 8비트 정수형(INT8) 구조로 변환하는 기술입니다. 모델의 용량을 획기적으로 줄이고 연산 속도를 끌어올려, 사양이 낮은 양산형 차량 제어기(ECU)에서도 인공지능이 실시간으로 구동될 수 있도록 만듭니다.

양자화 적용 결과, 모델의 크기를 10% 이상 축소(205.43 KB)하면서도 추론 속도는 기존 54.95Hz에서 137.26Hz로 약 2.5배 획기적으로 가속시켰습니다. 이는 F1 스코어의 미세한 하락(0.893)을 감수하고서라도, 차량 CAN 통신 버스의 기본 비트레이트(100Hz)를 안정적으로 상회하기 위한 선택이었습니다. 결과적으로 완벽한 실시간 온보드(On-board) 처리가 가능해졌음을 의미합니다.
HL만도는 이번 연구를 바탕으로 전기 모터와 같은 특정 컴포넌트의 잔존 수명(RUL)을 정밀하게 예측하고, 향후 바이와이어(Steer-by-Wire) 시스템 등 안전 필수 제어 영역으로 이 기술을 확장하여 '완전 자율 유지보수(Autonomous Maintenance)'가 가능한 지능형 SDV 시대를 열어가겠습니다.



